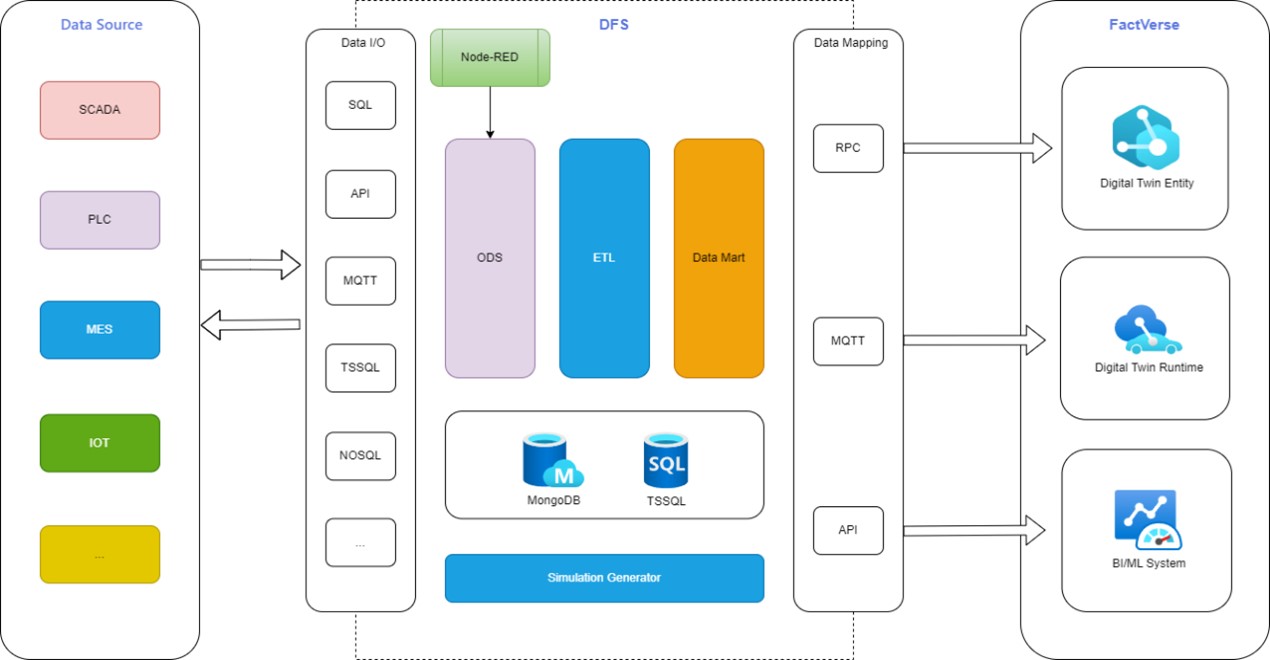
- DFS平台概览
- 数据上传与绑定孪生体流程详解
- 属性绑定演示与场景联动验证

DFS(Data Fusion Services)是一款用于连接和处理工业数据的融合引擎,能够整合、处理来自不同工业软件的数据,以便进行数据分析和业务优化。DFS可支持模拟数据或实时数据输入,并与设备及数字孪生体关联,实现数据驱动的模拟和优化。
更详细的产品使用手册请查看知识库。
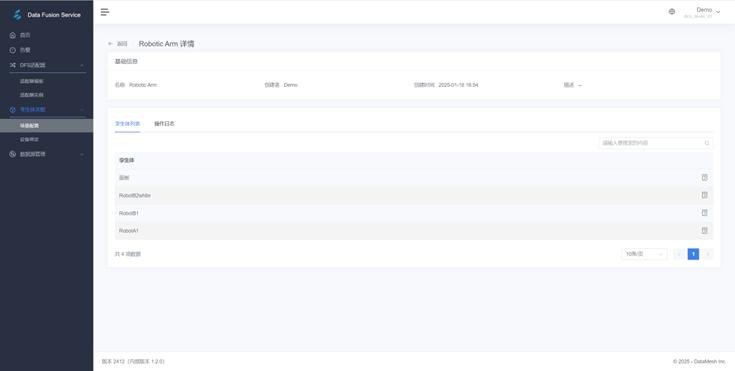
在DFS平台进入【孪生体关联】>【场景配置】页面,点击【导入】,选择需要绑定数据的孪生场景(这里我们绑定第一期我们预先制作好的机械臂孪生场景)。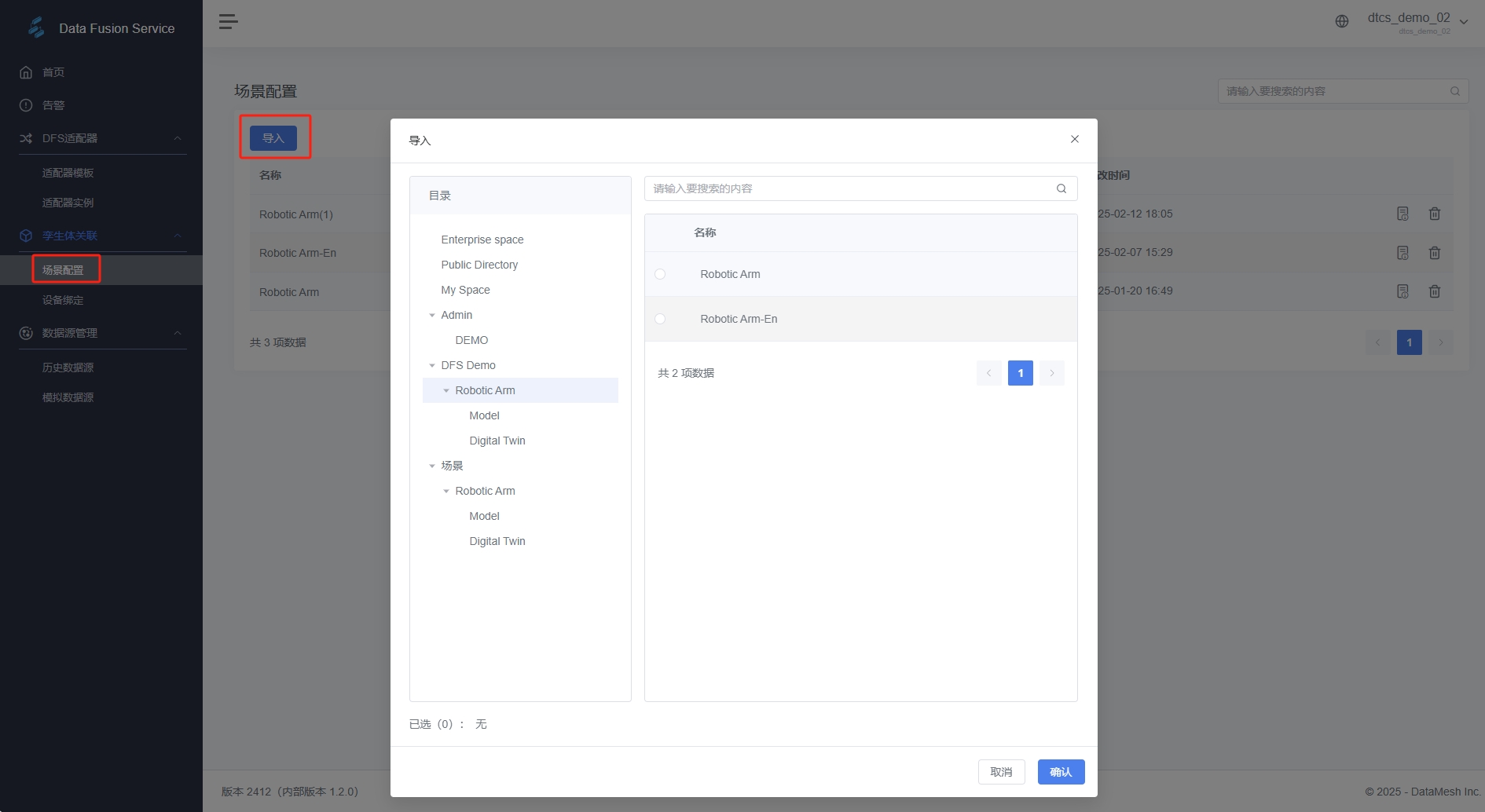
导入完成后,可在场景详情页查看该场景下包含的孪生体列表。