应用示例
示例一:基于历史/模拟数据源的仿真回放
场景概述
某生产线设备已积累运行数据,用户希望通过 DFS 回放验证设备与产线协同效果;或在缺乏真实数据时,使用模拟数据文件驱动仿真进行测试。
本示例展示如何通过模拟数据源驱动机械臂运行。
步骤一. 搭建数字孪生场景
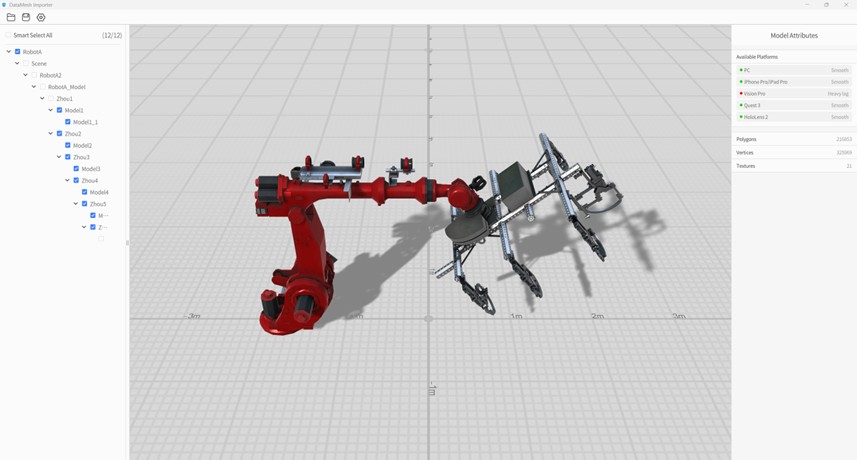
- 准备模型:
a) 在 DataMesh Importer中打开模型。
b) 根据实际运动需求,选择模型层级中的节点,以用于数据驱动。
c) 上传模型至您的FactVerse 资源库。
- 创建并配置模板:
a) 在FactVerse Designer中新建模板。
b) 放置机械臂模型,添加结构「各轴旋转角度」及其旋转属性(vector3)。
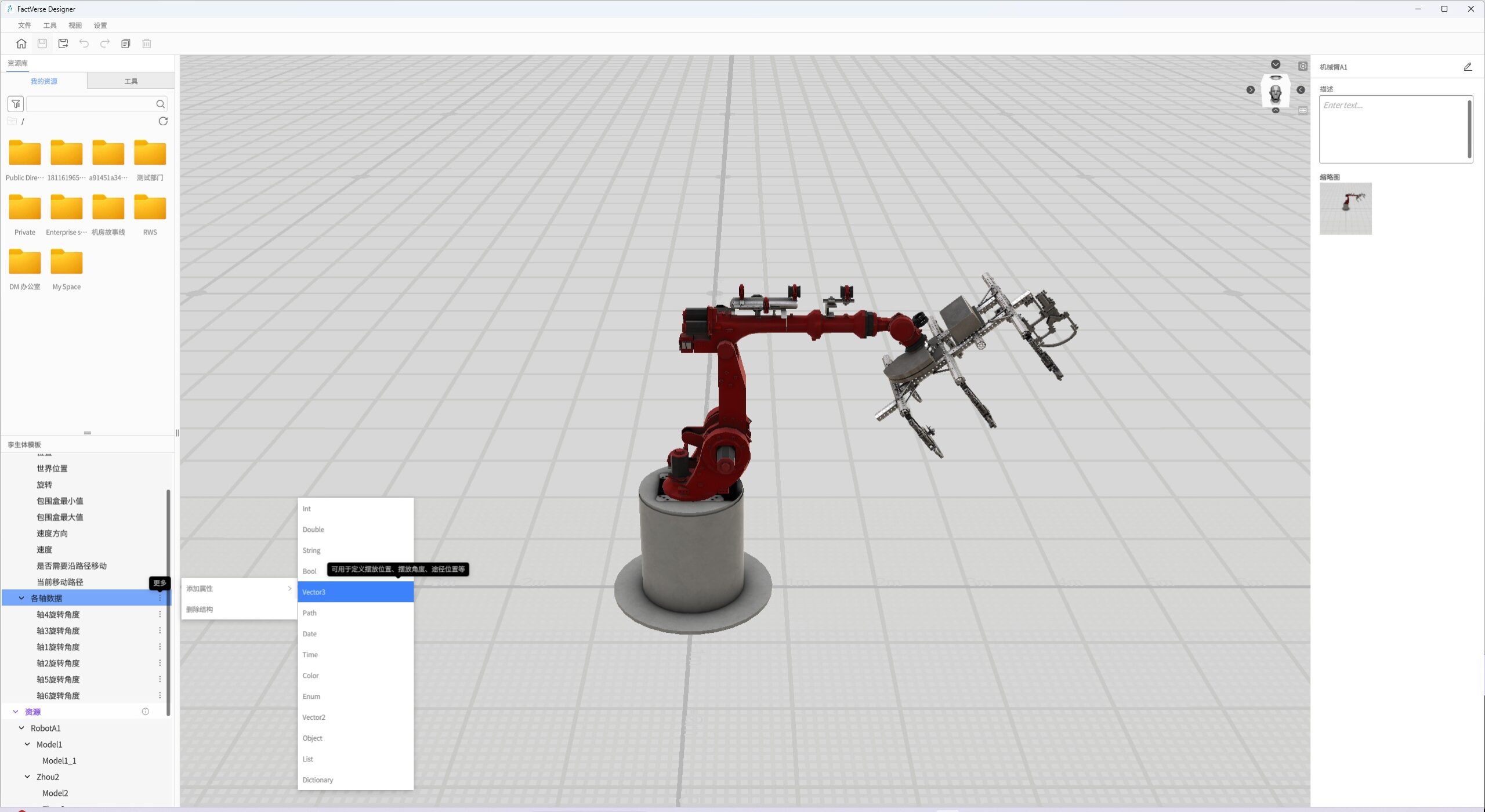
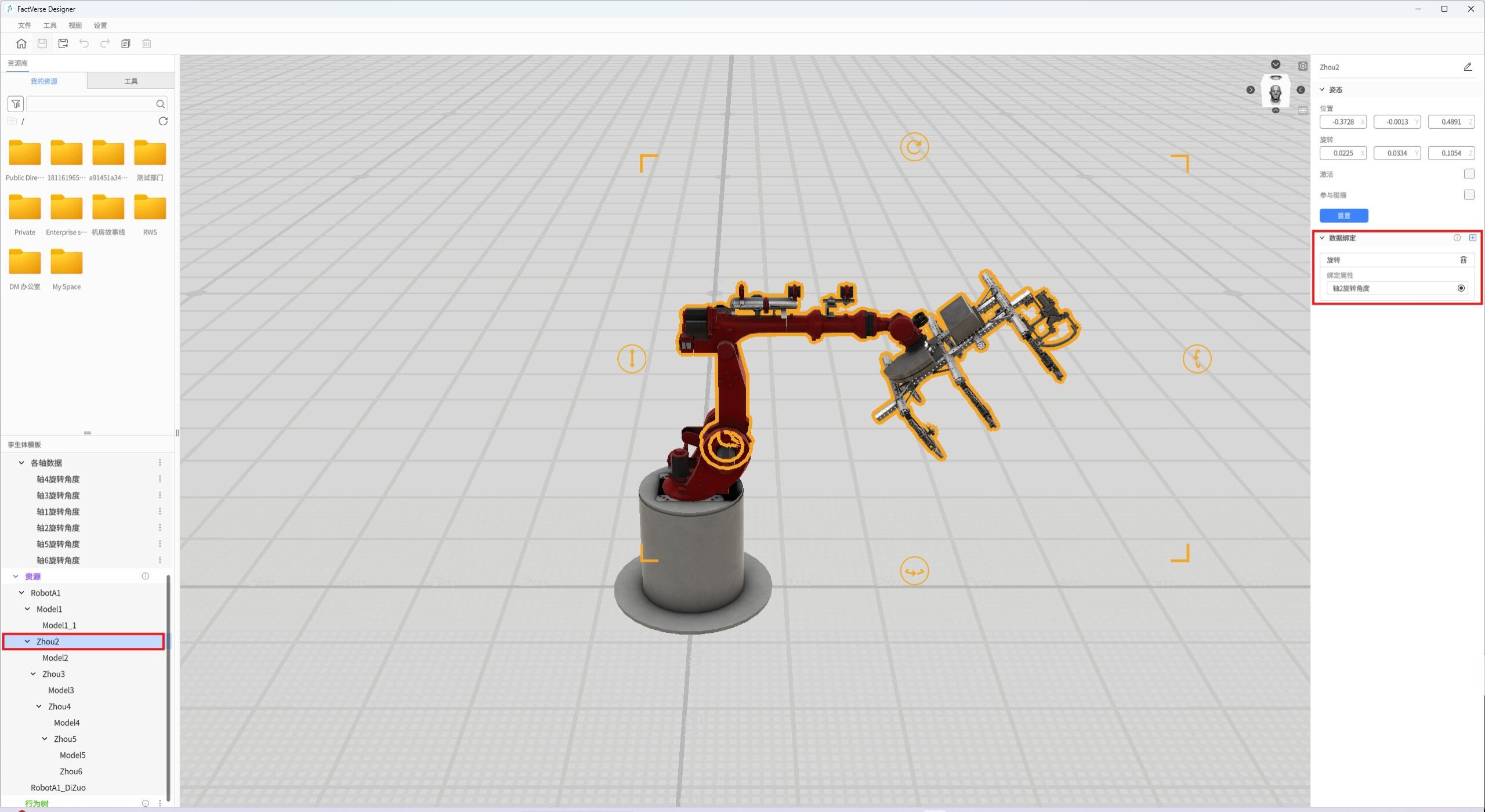
c) 在数据绑定区域,将模型层级与各轴旋转属性关联,完成后保存模板。
- 搭建孪生场景:
a) 新建孪生场景,基于已创建的机械臂模板生成孪生体“机械臂A1”。
b) 调整孪生体位置和布局,完成基础场景构建并保存。
步骤二 创建仿真任务
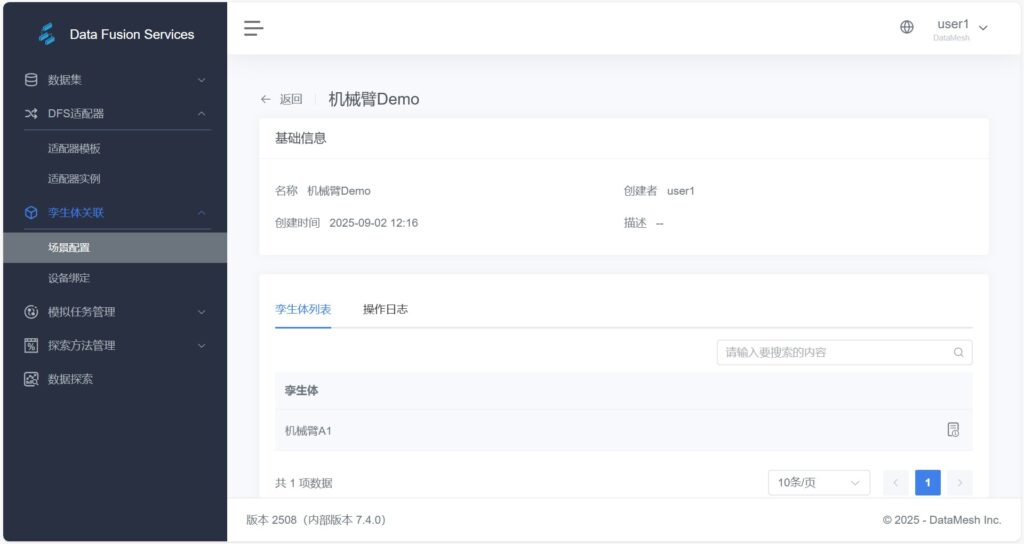
1. 导入孪生场景:在DFS平台进入【孪生体关联】>【场景配置】页面,点击【导入】,选择需要导入的孪生场景。
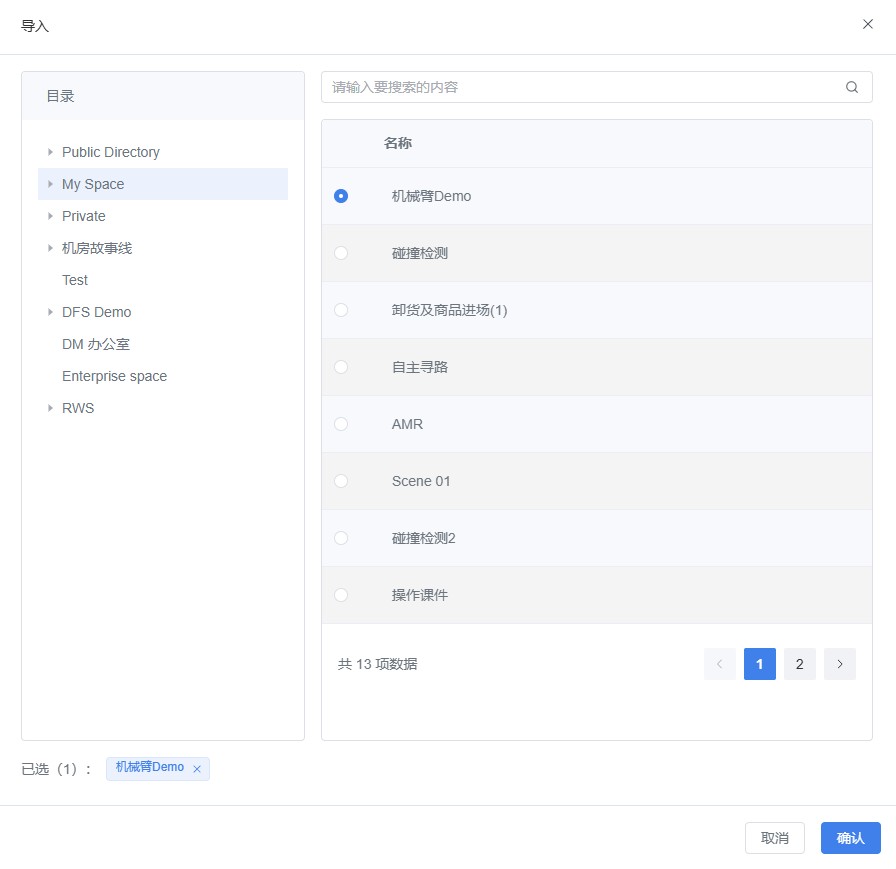
导入完成后,可在场景详情页查看孪生体列表。
2. 导入设备信息
您可以通过以下任一方式导入设备信息:
a) 在【适配器实例】页面中配置适配器实例,并发送设备数据,系统将自动生成设备信息;
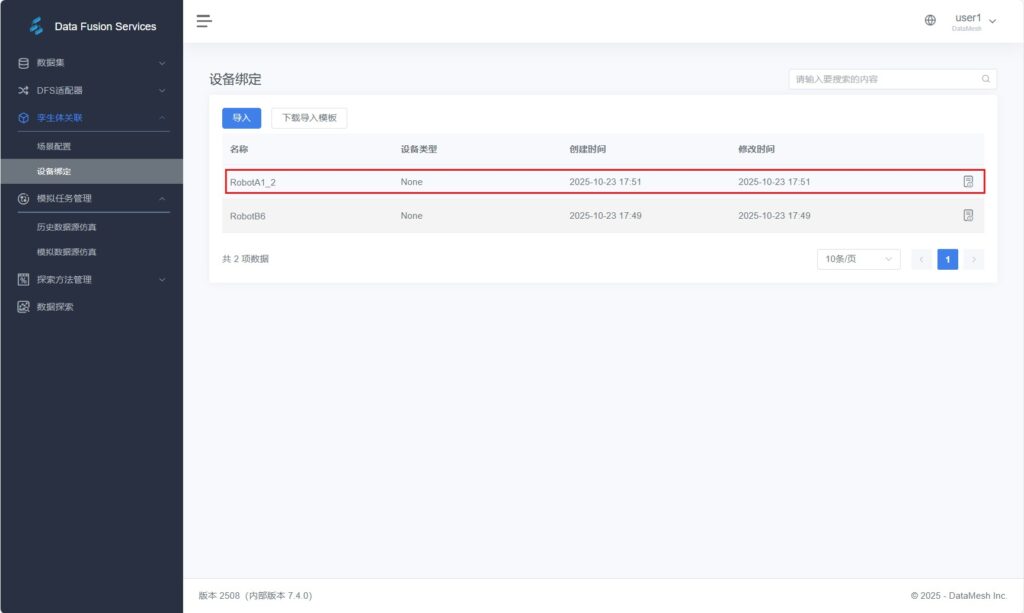
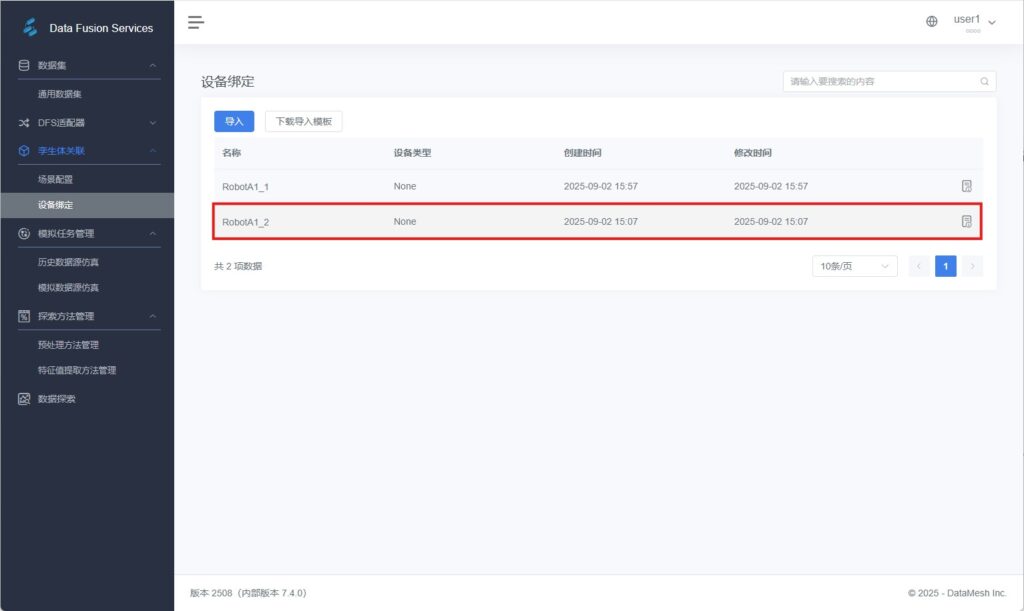
b) 或在【孪生体关联】>【设备绑定】页面,点击【导入】,通过模拟数据文件导入设备信息。
成功导入后,可在设备列表中看到设备信息。例如,“RobotA1_2”为后续模拟任务中需使用的设备名称。
3. 新建模拟数据源仿真任务:
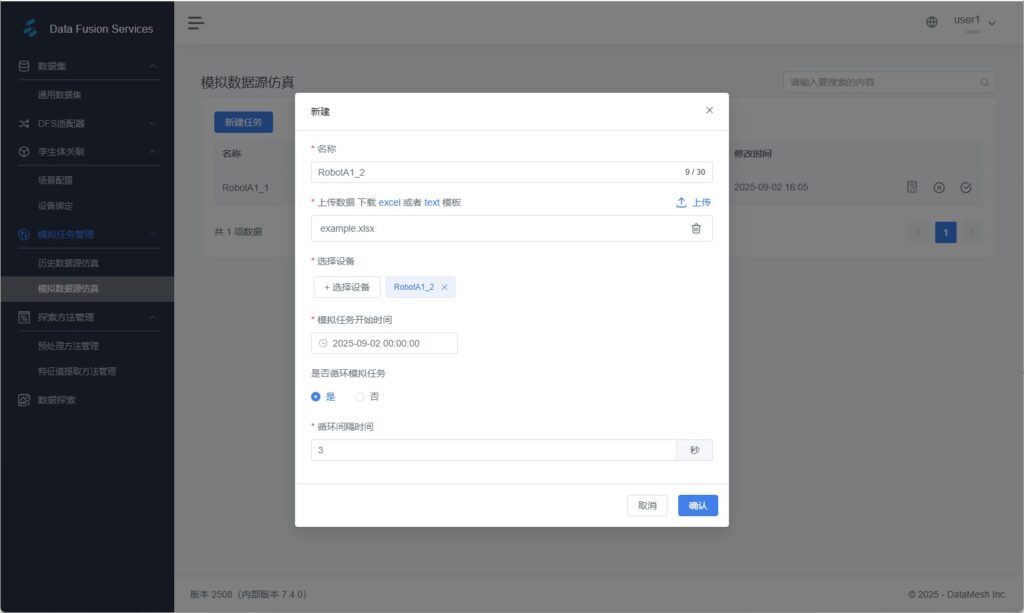
a) 进入【模拟任务管理】>【模拟数据源仿真】,新建任务并上传数据。
b) 为数据绑定对应的设备,并设置数据的循环间隔时间。
示例数据文件(example.xlsx)
设备名称(name) | 设备属性(key) | 设备属性值(value) | 数据生成时间戳 |
RobotA1_2 | A1Pos | 270,72.68018,0 | |
RobotA1_2 | A2Pos | 356.0886,330.6853,6.112504 | |
RobotA1_2 | A3Pos | 358.6275,297.3004,359.3982 | |
RobotA1_2 | A4Pos | 0.8182315,352.0203,268.8459 | |
RobotA1_2 | A5Pos | 73.55777,344.6217,255.9178 | |
RobotA1_2 | A6Pos | 8.447219,89.98469,1.294706E-06 |
4. 绑定数据到孪生体
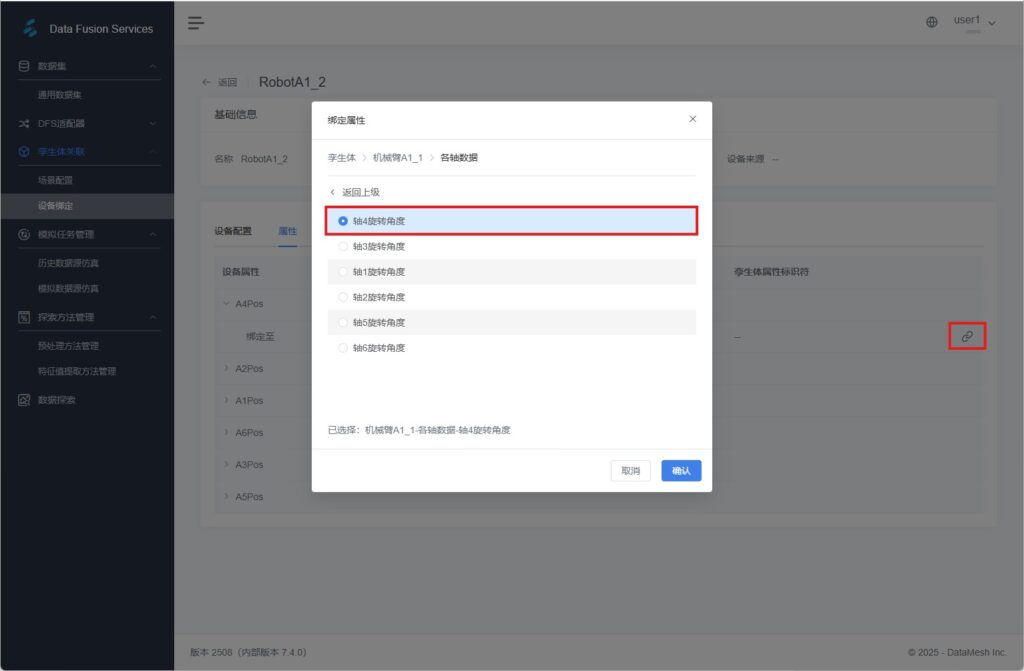
a) 进入【孪生体关联】>【设备绑定】页面,选择要绑定的设备并进入详情页。
b) 在设备配置栏里,点击【配置孪生体】,在弹窗中选择对应孪生体。

c) 在属性栏里,点击绑定图标,将设备属性与孪生体属性逐一绑定.
步骤三 场景验证
- 返回 FactVerse Designer,打开已绑定数据的孪生场景。
- 点击【调试播放】,观察机械臂各关节随模拟数据驱动运动。
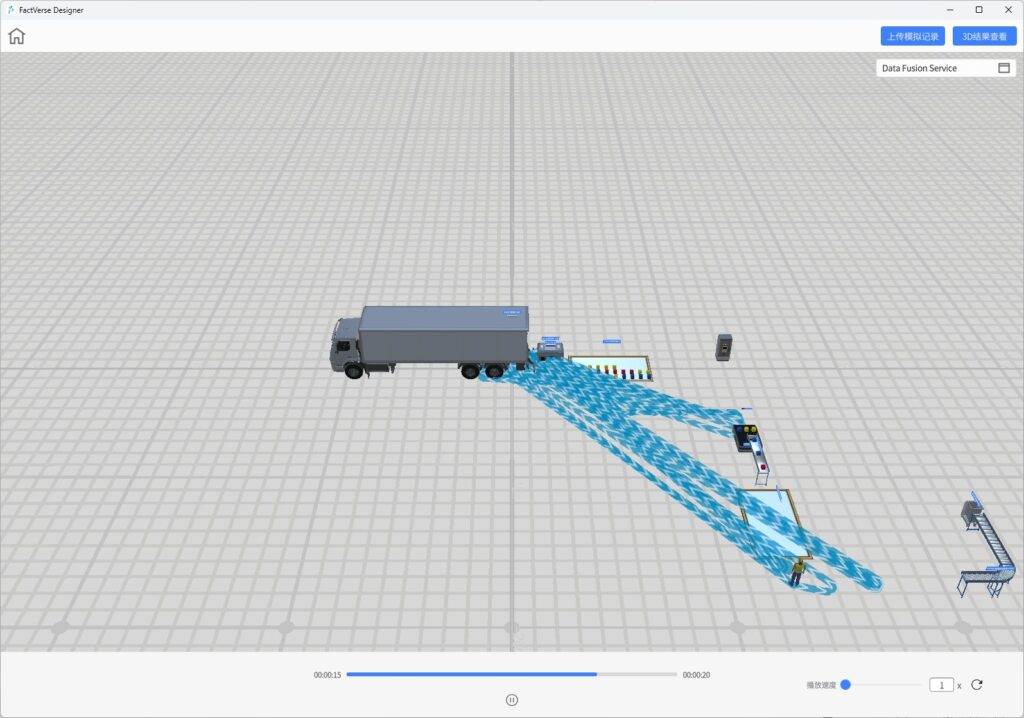
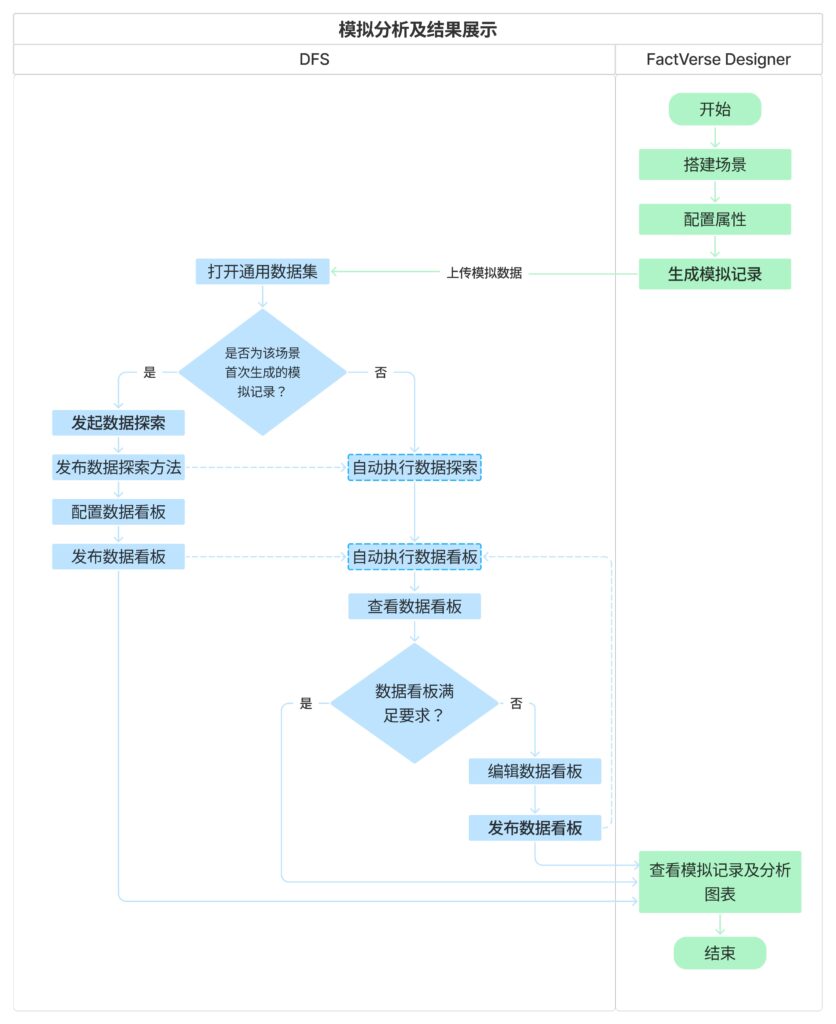
示例二:Designer 模拟记录分析
场景概述
在 Designer 中运行多个模拟,对比不同参数下的生产效率,并自动生成可视化看板用于决策分析。
步骤一 前置准备
- 搭建场景:在 FactVerse Designer 中构建数字孪生场景,配置需要验证的参数。
- 生成模拟记录
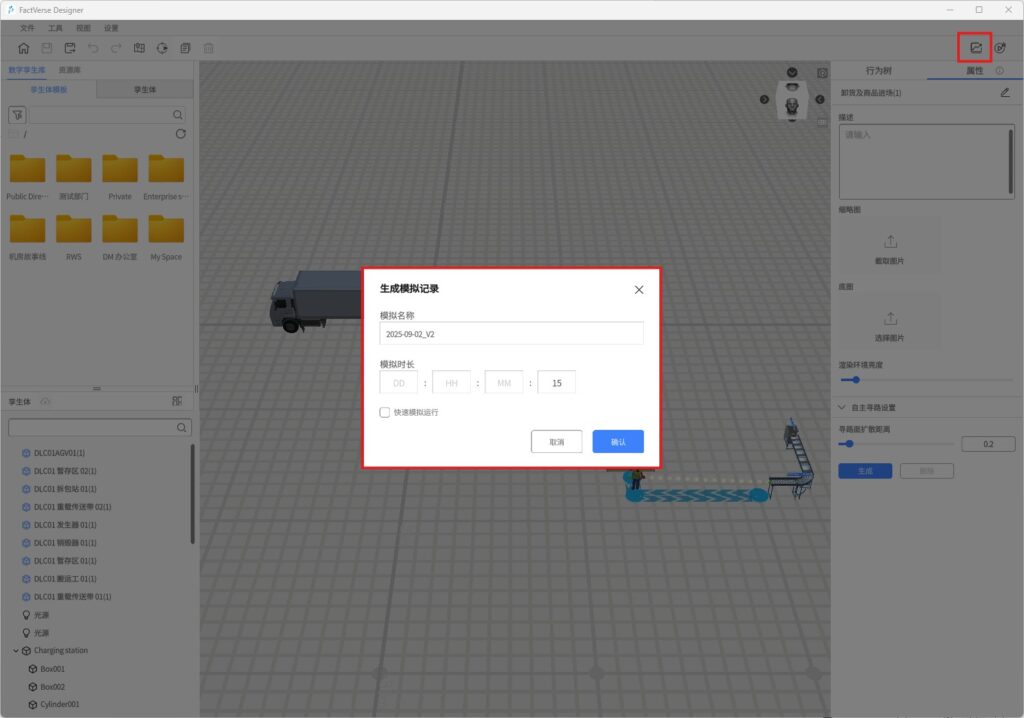
- 运行场景,产生不同配置与时长下的模拟结果。
- 系统会生成对应的模拟回顾记录,作为后续分析的数据来源。
- 上传至 DFS
- 模拟运行结束后,记录会自动上传至 DFS。
- 上传完成后,可在 Designer 中直接打开 DFS 的【通用数据集】界面进行数据分析。
步骤二 数据探索与发布
在本示例中,进行数据探索的目的在于:
- 将模拟回顾记录转化为可分析的结果数据集;
- 为看板展示提供数据输入;
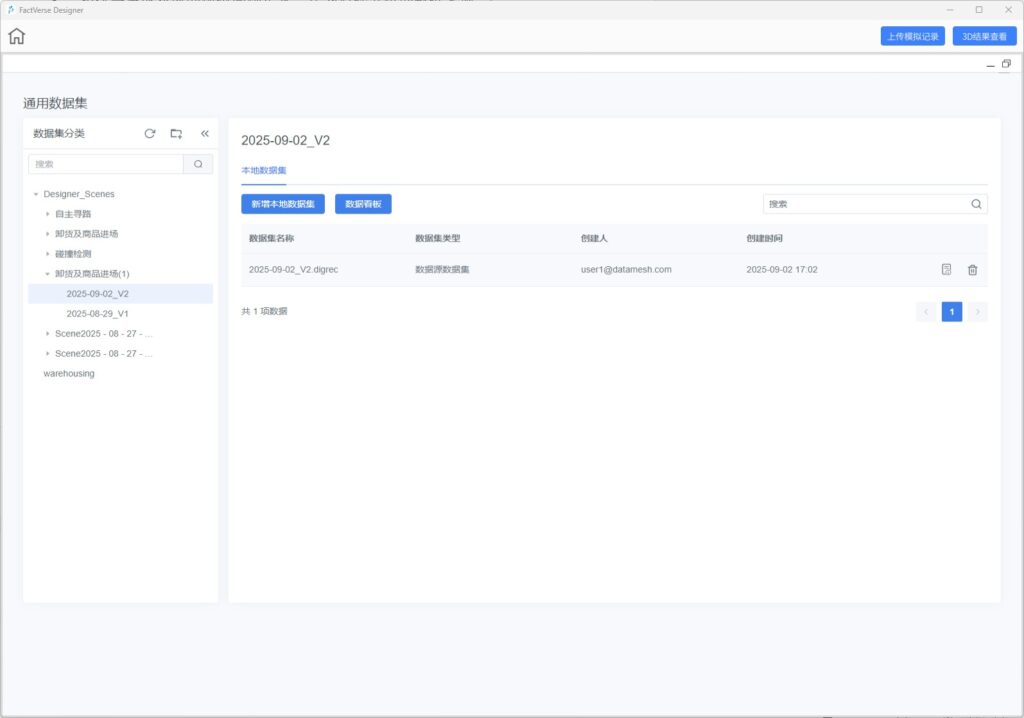
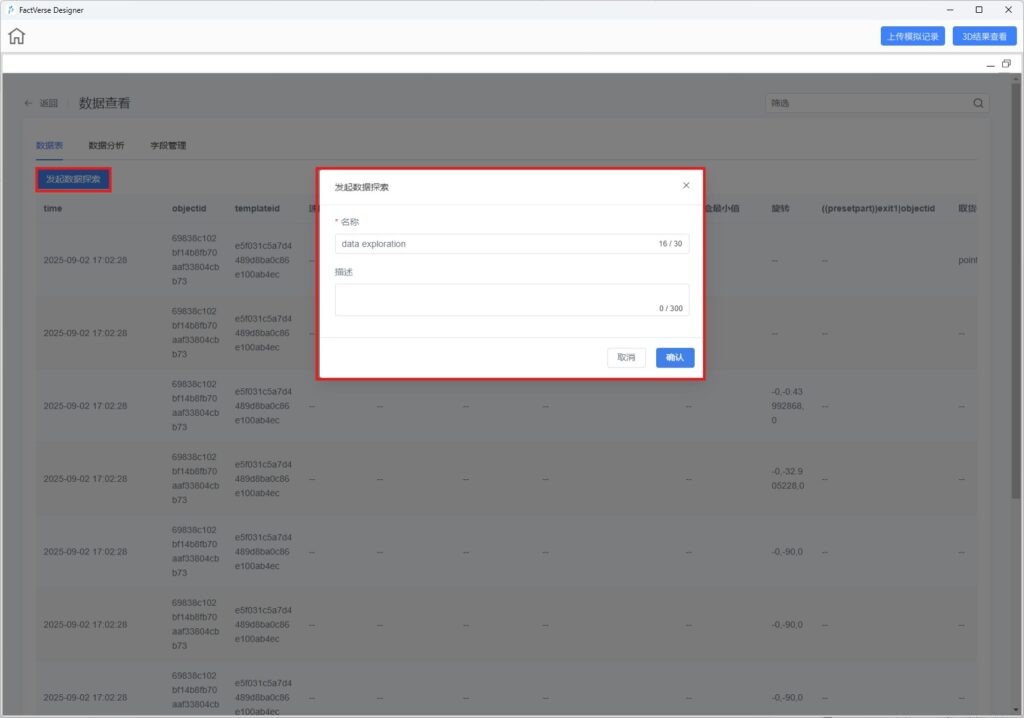
- 发起数据探索
- 在通用数据集分类目录中选取本次上传的数据集。
- 进入该数据集的数据查看页,点击“数据表”页签中的【发起数据探索】按钮进行数据探索。
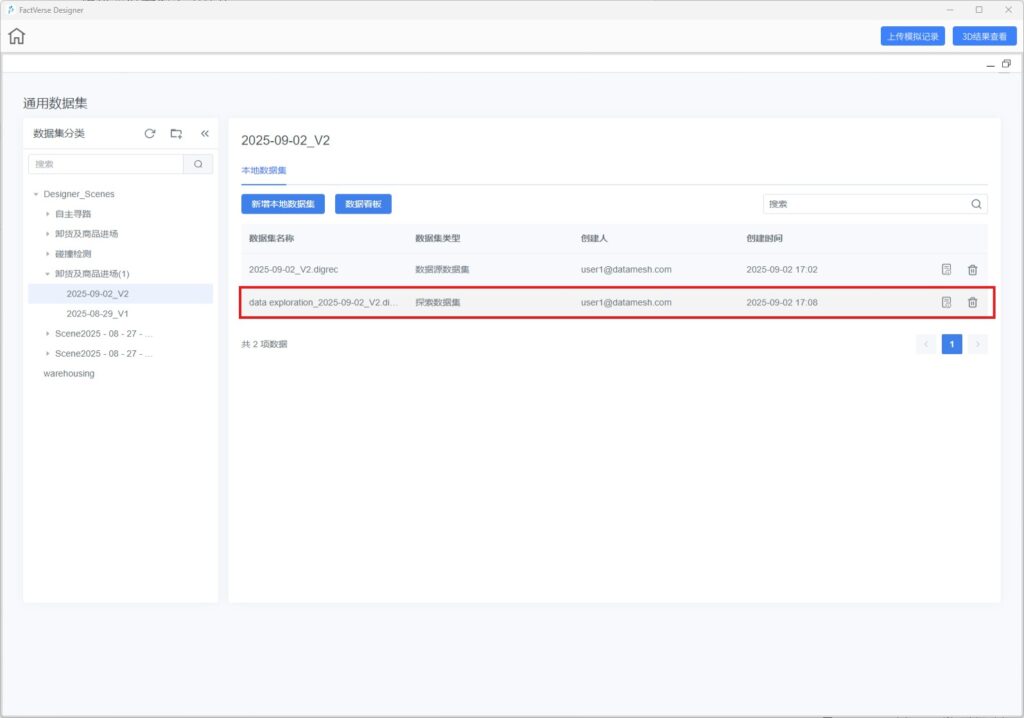
- 发布数据探索方法
- 构建并发布探索方法流。
- 执行结果输出为新的探索数据集
- 每次新生成模拟记录时,系统会自动执行探索任务。
步骤三 结果复用与分析
- 配置数据看板
- 创建并保存数据看板,用于展示探索结果。
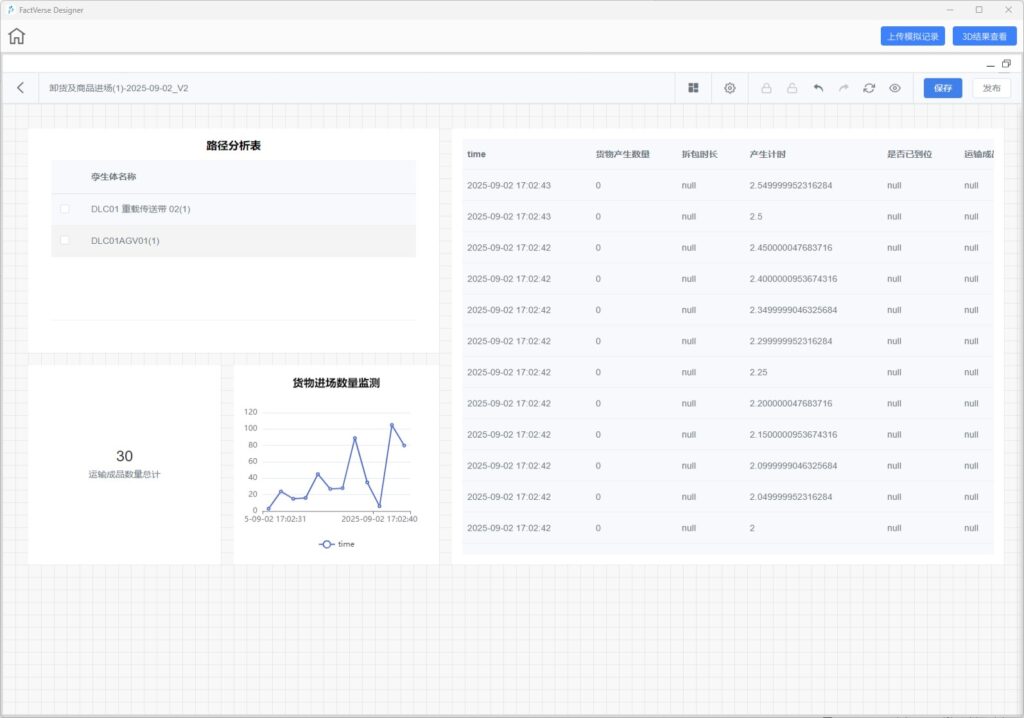
- 发布数据看板
- 发布看板后,系统会在每次生成模拟记录时自动更新数据探索结果并刷新看板。
- 查看与分析
- 通过“3D 结果查看”重现模拟过程,评估路径合理性与效率,发现潜在优化空间并规划更优调度方案。
- 根据分析结果调整参数,重新生成模拟记录并查看更新后的看板结果。