我们能帮你什么吗?
快速上手搭建数字孪生场景
本章将通过 FactVerse 资源包中的模板和模型,展示使用 FactVerse Designer 构建数字孪生场景的基本流程。
基本流程
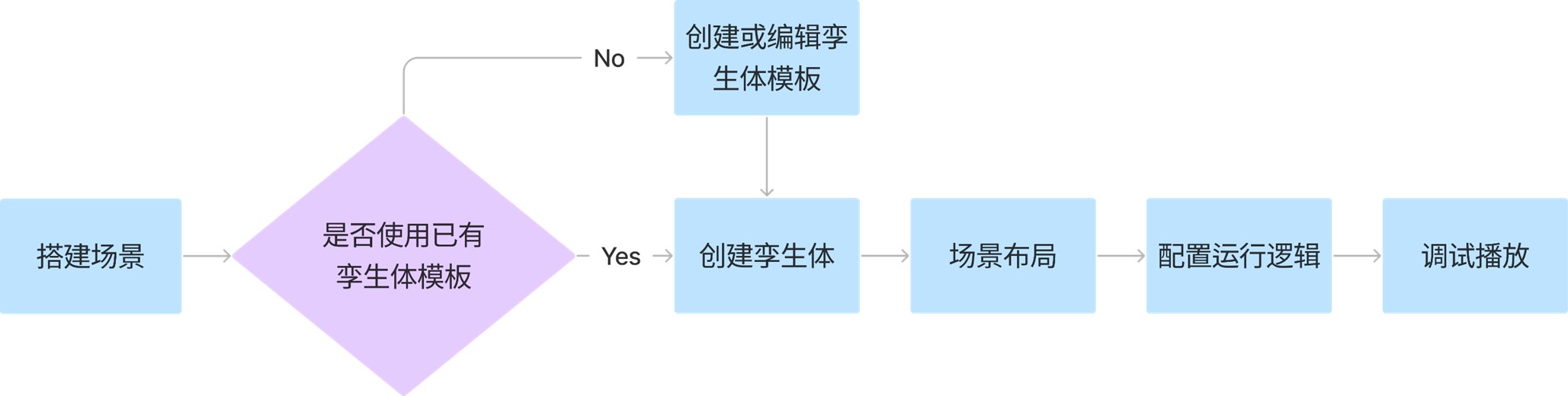
- 创建孪生体模板
- 使用预设模板:如果您使用 FactVerse 资源包中的预设模板,这一过程可以省略;
- 自定义模板:如果需要创建自定义孪生体模板,参考“创建孪生体模板”相关章节中的指南进行操作。
- 创建孪生体
- 基于所选择的孪生体模板,您可以手动创建孪生体,也可以批量创建多个孪生体以适应大规模的生产环境。
- 场景布局、配置连接关系:
- 布局规划:安排孪生体的位置和布局,确保它们在场景中协同工作。
- 配置连接:配置孪生体之间的连接关系,以实现产品或物流的方向。
- 运行逻辑配置:
- 属性配置:针对孪生体进行属性配置,确保它们能够正确地模拟实际工厂中的行为。
- 路径规划:为孪生体配置移动路径,确保它们能够按照预定路线进行操作和运输。
- 行为树编辑:使用行为树编辑工具,定义孪生体的交互行为和动作。
- 调试播放:
- 运行与检查:在 FactVerse Designer 中运行已配置的数字孪生场景,查看场景整体的运行效果。
- 调试场景行为:通过暂停、单步播放等功能,检查孪生体之间的交互逻辑、路径运动和状态变化,识别并排查潜在问题。
- 验证模拟效果:结合属性值变化、颜色变化、动作触发等反馈,验证模拟是否符合预期设计目标。
使用虚拟工厂资源包中的模板创建孪生体
本节将指导您如何使用虚拟工厂资源包中的模板,快速创建以下常用孪生体:
- 一个重载平型传送带
- 一个原料生成器
- 一辆 AGV 小车
- 一个暂存区
通过以下示例,您将了解创建孪生体的关键操作步骤。
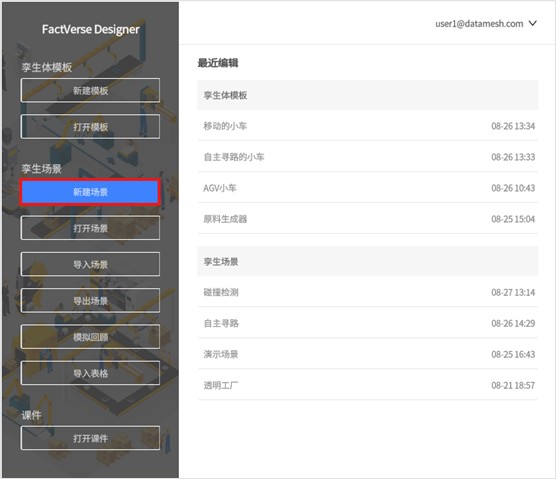
1. 新建场景:在 FactVerse Designer中,点击主页中的【新建场景】按钮,在场景编辑器中打开新场景。
2. 创建重载平型传送带:
a) 在 数字孪生库 > 孪生体模板 中,展开路径 /Public Directory/FactVerseDLC/,点击“重载平型带”模板。
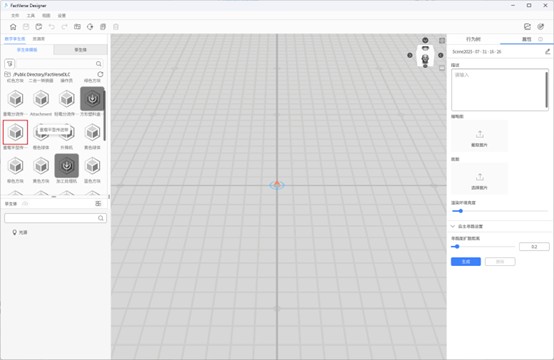
b) 在场景编辑区域,点击要放置传送带的位置,即可创建并放置该孪生体。
c) 放置完成后,点击右键退出放置模式。
3. 创建原料生成器:
a) 在 数字孪生库 > 孪生体模板 中,点击模板 /Public Directory/FactVerseDLC/原料生成器 。
b) 在场景中点击目标位置,放置原料生成器。
c) 放置完成后,点击右键退出放置模式。
4. 创建存储区:
a) 在 数字孪生库 > 孪生体模板 中,点击模板 /Public Directory/FactVerseDLC/暂存区 。
b) 在场景中点击目标位置,放置暂存区。
c) 放置完成后,点击右键退出放置模式。
5. 创建 AGV 小车:
a) 在 数字孪生库 > 孪生体模板 中,点击模板 /Public Directory/FactVerseDLC/AGV小车 。
b) 在场景中点击目标位置,放置AGV小车。
c) 放置完成后,点击右键退出放置模式。
6. 保存场景:点击工具栏中的【保存】按钮 ![]() 保存场景,并命名场景为“简易场景演示”。
保存场景,并命名场景为“简易场景演示”。
场景布局、配置连接关系
本节将通过示例指导您如何在场景中合理布局各个孪生体,并通过配置连接关系实现生产流程的模拟。您还将学习如何进行调试,确保各个孪生体运行逻辑正确、流程顺畅
布局规划
根据实际生产流程,对孪生体的位置、尺寸进行调整,使其在场景中能准确反映业务逻辑。
调整传送带长度和高度
您可以通过传送带的编辑工具来调整传送带的长度和高度,以适应您的模拟需求。以下是调整步骤:
1. 在场景区中,选中传送带,然后点击【编辑】按钮,进入传送带的编辑模式。
2. 在编辑模式下,您可以使用传送带的编辑工具来拉伸传送带,调整其长度,并调整传送带的高度。
a) 拉伸传送带:在编辑模式下,点击传送带编辑工具长度调节线(红色)的一侧端点,然后按住鼠标左键,拖动鼠标来调整传送带的长度。
b) 调整传送带高度:在编辑模式下,点击传送带编辑工具的高度调节线(绿色)端点,然后按住鼠标左键,上下移动鼠标来调整传送带的高度。
3. 完成调整后,点击【结束编辑】按钮,退出传送带的编辑模式。
4. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
为传送带添加一个新节点
添加传送带节点的步骤如下:
1. 点击选中传送带,点击【编辑】。
2. 在场景区中空白区域双击鼠标,为传送带增加节点。如需删除节点,点击【删除节点】选项,即可删除传送带末段部分。
3. 当节点添加完成时,点击【结束编辑】。
4. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
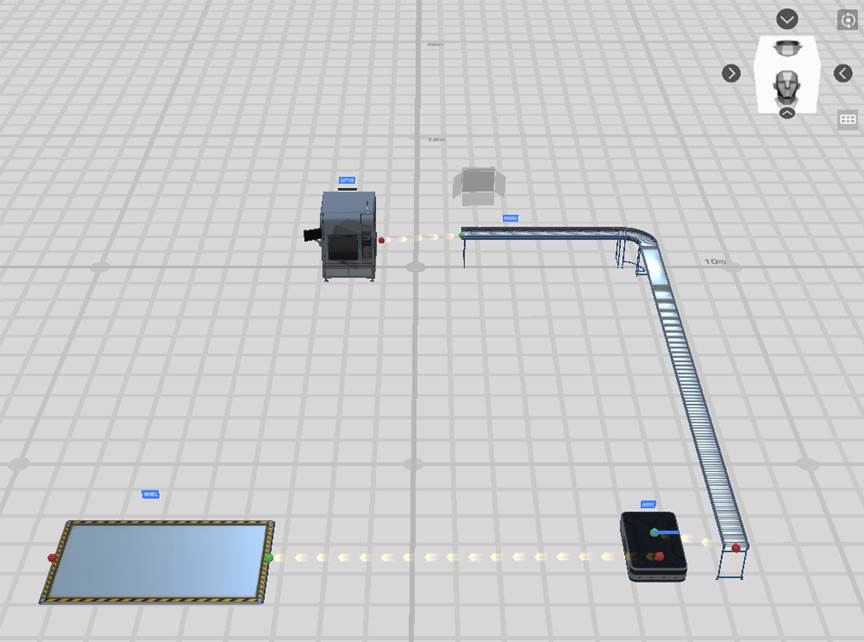
配置连接关系
在虚拟工厂场景中,为了使生产线上的货物能够在孪生体之间进行传输,需要进行孪生体出入口的连接。
本节将连接以下出入口:
- 原料生成器出口(
 ) 和传送带入口(
) 和传送带入口( )
) - 传送带出口() 和AGV小车入口()
- AGV小车出口()和暂存区入口()
注意:无需连接同一个孪生体的出口和入口。
以下是连接出入口的步骤:
1. 点击场景中原料生成器的出口(![]() ),然后点击【连接】。
),然后点击【连接】。
2. 移动鼠标到传送带的入口(![]() )上方,左键单击完成原料生成器的出口(
)上方,左键单击完成原料生成器的出口(![]() )到传送带的入口(
)到传送带的入口(![]() )的连接。
)的连接。
3. 以同样方式分别连接以下出口和入口:
- 传送带出口() 和AGV小车入口()
- AGV小车出口()和暂存区入口()
4. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
配置运行逻辑
设置原料生成器的主功能
本节将介绍如何设置原料生成器的主功能,使您的虚拟工厂场景可以按照您的设定进行模拟生产。以下是设置原料生成器的主功能的步骤:
1. 在场景区中,选中原料生成器。
2. 在属性区的属性标签下,找到主功能选项下的产生孪生体使用的模板标识符设置选项,并点击旁边的编辑按钮。在打开的模板列表中选择一个资源包中的产物类模板,这样生成器将按照这个模板生产具体的物品。
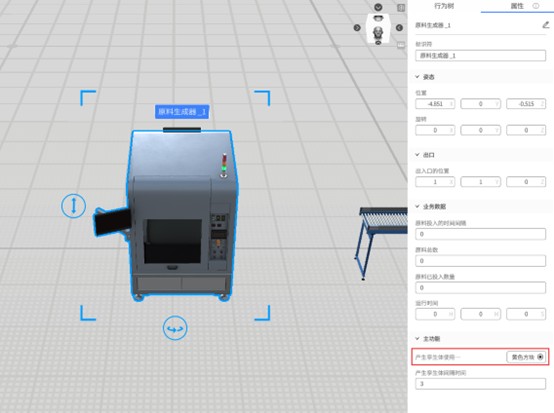
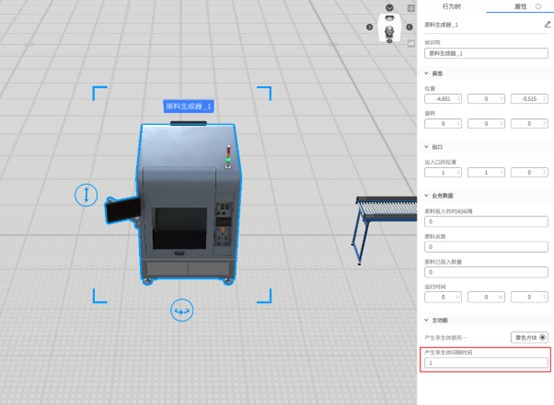
3. 修改原料生成器的产生孪生体间隔时间(即生成器生产物品的时间间隔),您可以将时间间隔设置为适当的数值,以模拟实际工厂中的生产节奏。
4. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
修改传送带的速度
本节中将调整传送带速度为“5”米/秒,使传送带在模拟过程中以更快的速度运行。
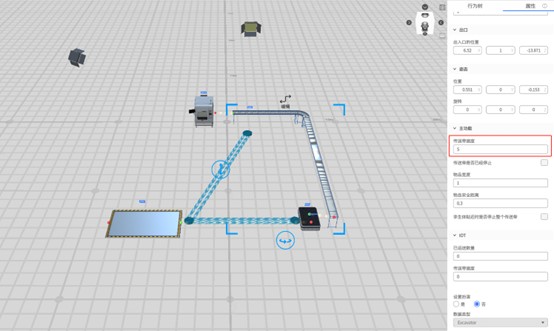
1. 在场景区中,点击选中传送带。
2. 在属性区,修改传送带速度的值为“5”。
3. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
为 AGV 小车创建行驶路径
为 AGV 小车创建行驶路径是为了使其能够按照设定的路线进行移动。以下是创建AGV小车行驶路径的步骤:
1. 点击工具栏中的【路径模式】按钮 ![]() ,打开路径模式界面。
,打开路径模式界面。
2. 点击工具栏中的构建按钮![]() ,进入构建模式。
,进入构建模式。
3. 在场景区中点击三个不同位置,为无人车的行驶路径建立三个路径点:
- point0:取货位置
- point1:出货位置
- point2:充电位置
4. 点击工具栏中的【选择】按钮 ![]() ,进入选择模式。
,进入选择模式。
5. 选中point0和point1 之间的连通线,设置连通方向为双向 ↔。
6. 选中point1和point2 之间的连通线,设置连通方向为双向 ↔。
7. 点击 < 退出路径模式界面,返回场景编辑器界面,并弹出保存路径的提示窗口。
8. 在提示信息窗口中,点击【是】按钮保存路径。
9. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
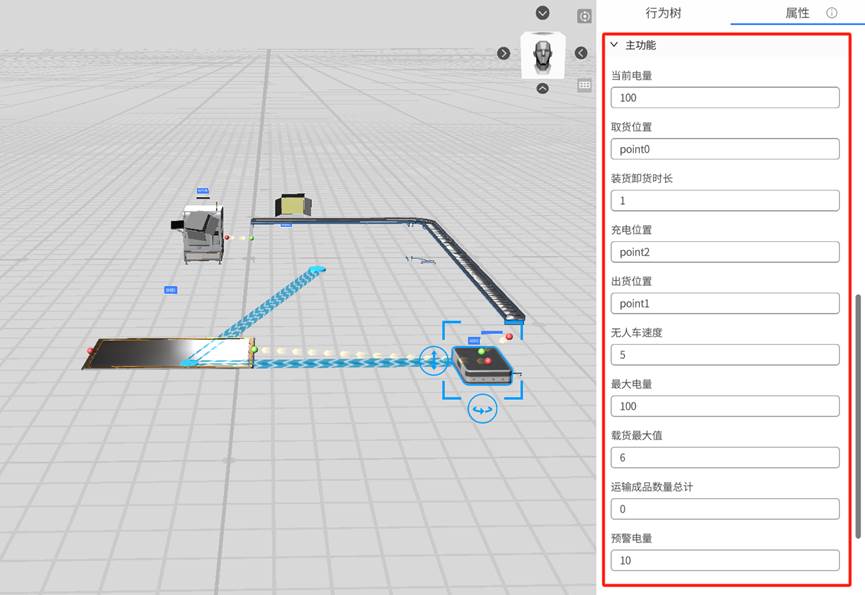
设置 AGV小车的主功能
设置 AGV小车的主功能是为了确保它能按照预定的路径和设定的参数进行移动和任务执行。
以下是设置 AGV小车主功能的步骤:
1. 在场景区中,选中 AGV小车。
2. 设置 AGV小车移动的路径点。
- “取货位置”为之前设置的路径点名称,例如:point0。
- “出货位置”为之前设置的路径点名称,例如:point1。
- “充电位置”为之前设置的路径点名称,例如:point2。
3. 设置“无人车速度”为“5”。
4. 设置“载货最大值”为“6”(即最多可以装载6个货物)。
5. 设置“装货卸货时长”为“1”(表示装货或卸货所需的时间为1秒)。
6. 点击工具栏中的【保存】按钮 ![]() 保存场景。
保存场景。
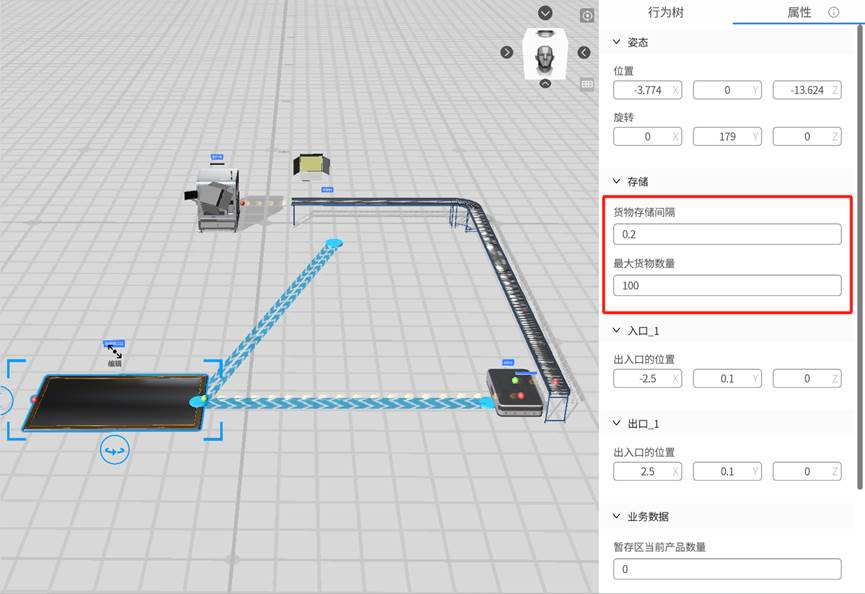
设置暂存区
暂存区用于存放货物,可通过配置存储属性来控制其容量和存放规则。
配置项:
- 最大货物数量:设定暂存区最多可存放的货物数量。
- 货物存储间隔:定义每个存储单元之间的间隔距离。暂存区按照暂存区模板的货物宽度、货物长度和货物高度自动划分存储单元。每个存储单元最多可存放 1 个货物。
播放预览场景
您可以通过以下步骤预览场景,并调整播放设置:
1. 点击场景编辑器工具栏中的【调试播放】按钮 ![]() 开始预览场景,以查看整个场景的效果。
开始预览场景,以查看整个场景的效果。
2. 在播放过程中,使用播放进度条可以控制播放速度。若需要暂停播放,可点击暂停按钮实现暂停功能。
3. 点击退出按钮 ![]() 则可以退出播放模式。
则可以退出播放模式。